浜正タイランド
YAMAHA ロボット、ユニバーサルロボットのタイ代理店 自動化のトータルソリューションはお任せください。
株式会社コスメックKOSMEK LTD. |  |
ロボットハンドチェンジャーをはじめ、ロボットハンド、高精度位置決め機器、カプラ等をラインナップ
搬送・組付・バリ取り・検査・溶接・洗浄等さまざまな工程の自動化・高精度化・段取改善を実現します。
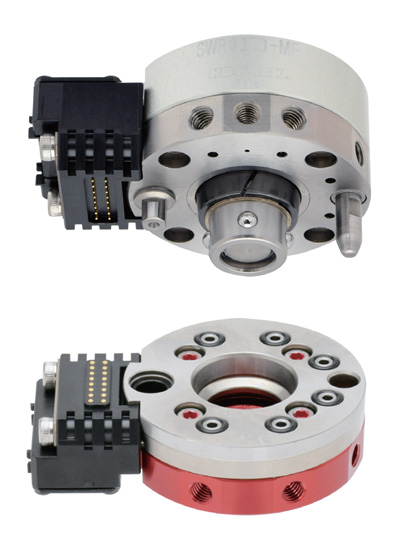
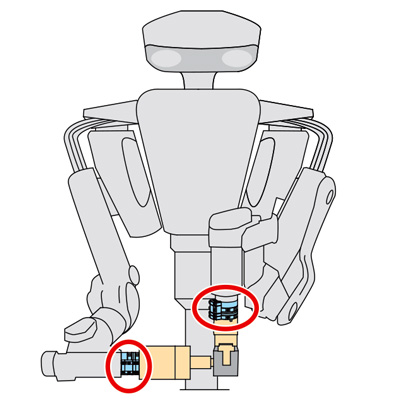
ロボットハンドチェンジャー Model SWR |
高精度・高剛性・高寿命! |
● | 可動式テーパスリーブによる二面拘束で位置再現精度0.003mmを実現 |
● | 軽量・コンパクト |
● | 耐久性200万回使用以上で高剛性かつ長寿命 |
● | 連結部ガタツキゼロで芯ブレやビビりを防止 |
● | 電極部の通信エラーによるチョコ停を防止 |
● | ツール落下を防止するセルフロック機能で安全 |
● | 連結時はリフト機能で位置決め部を保護 |
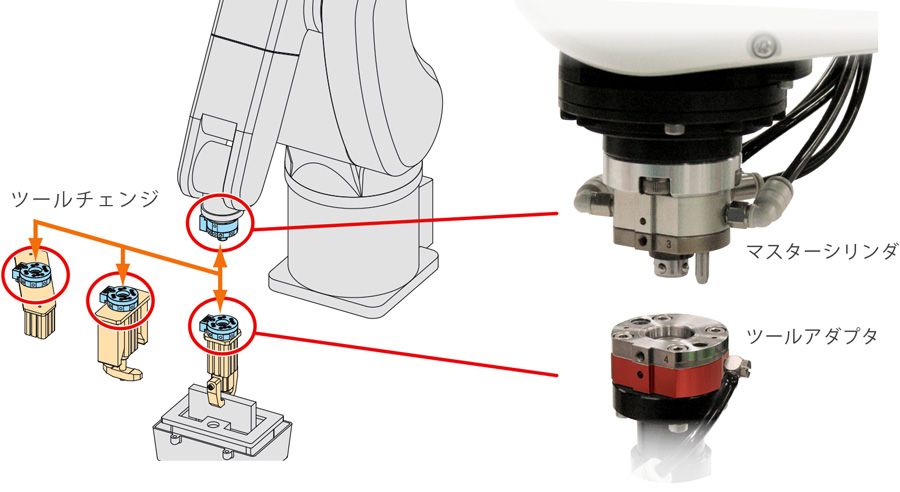
あらゆる作業を1台のロボットで完結
多関節ロボットの搬送・組立作業 |
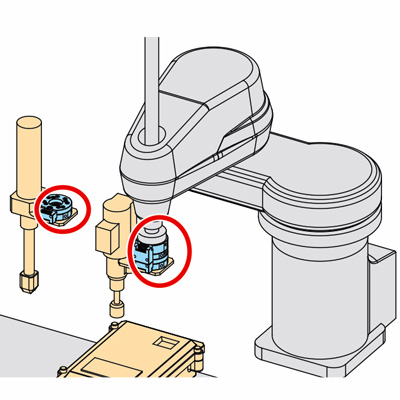
スカラロボットのナットランナーの交換 |
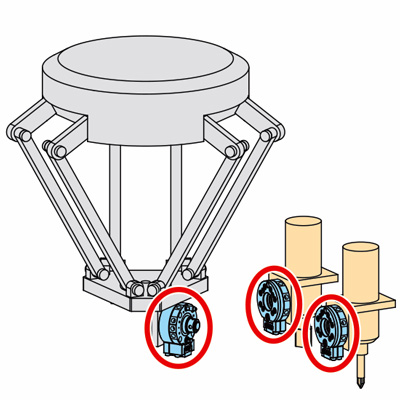
パラレルリンクロボットのネジ締め作業 |
双腕ロボットの組立作業 |
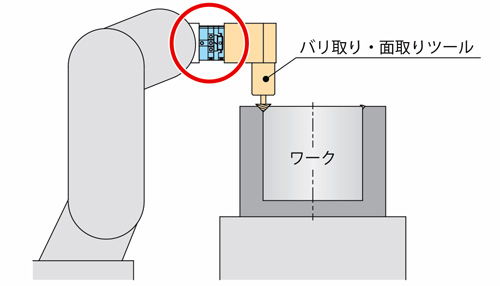
バリ取り・加工ツールチェンジ |
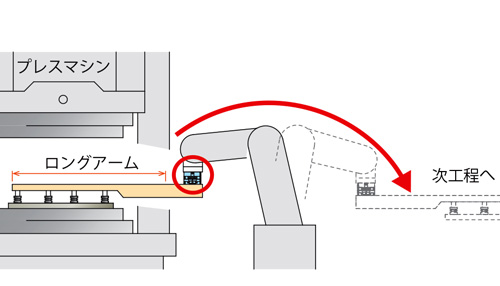
プレス間搬送用ロボットの搬送アームに |
紹介動画
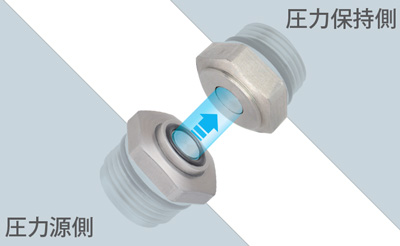
リークレスカプラ Model JWC/JWD |
エア源を切り離した状態で、エア機器のロック状態を保持できる |
● | オールステンレス |
● | 工程間パレット搬送の問題の解決に(搬送時ワークのロック状態を保持) |
● | リークレスカプラを加圧分離しても、信頼性の高い圧力保持性能を発揮 |
● | リークレスカプラをロケートクランプ/パレットクランプによって接続可能 ※ リークレスカプラを加圧接続する際は、仕様の反力以上の荷重で押付けた状態で、 |

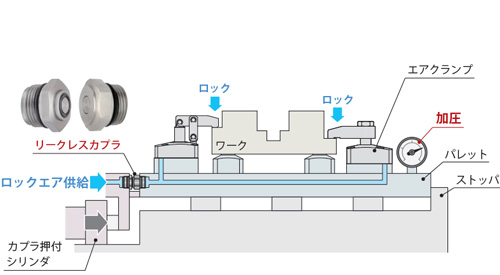
リークレスカプラで 工程間パレット搬送の問題を解決
リークレスカプラで 工程間パレット搬送の問題を解決
| 1 ワーク搬入・ワーククランプ
リークレスカプラ経由で、エア供給 |
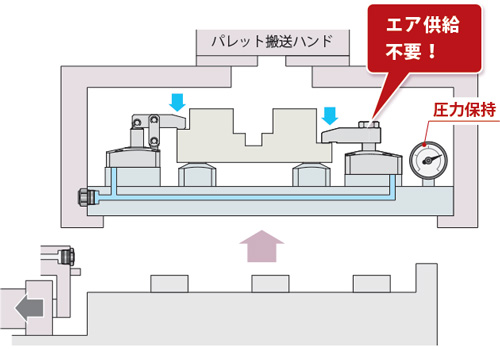
| 2 パレット搬送
リークレスカプラを加圧状態で分離します。パレットのエア回路内に圧力を封じ込めることができるため、搬送中のエア供給が不要です。エアチューブレスで、制限のないティーチングが可能です。 |

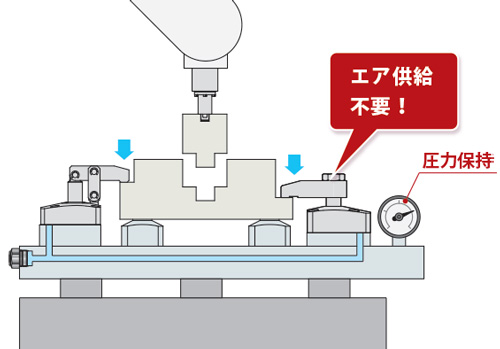
| 3 中間工程 ( 加工工程・圧入工程 )
ワークをロック状態のまま、次工程へ搬送できます。エア源のない環境でも使用することができます。 |
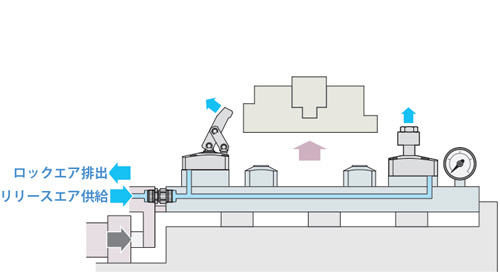
| 4 ワーク搬出
作業完了後、再度リークレスカプラを接続し、エアを排出します。 (リリース側へエアを供給し、ワークを搬出します。) |
紹介動画
